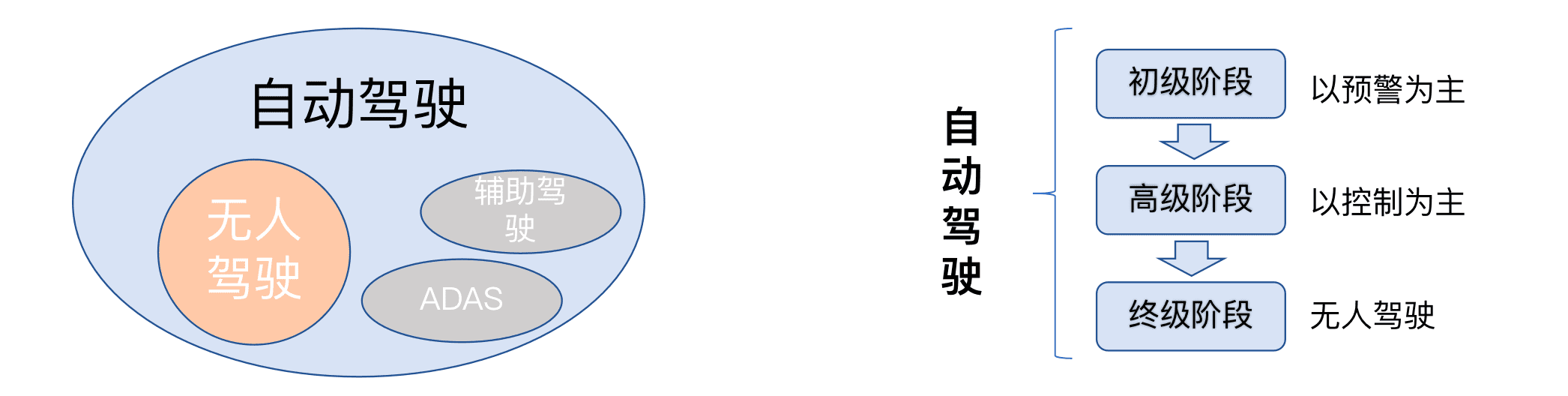
自动驾驶汽车可以实现驾驶员驾驶、系统辅助驾驶员驾驶以及系统自动驾驶。而无人驾驶汽车是不需要驾驶员的,即便在紧急情况时也能自行处理。
最近调研了一下ADAS,感觉是一个不错的方向。然而个人认为自动驾驶的corner case太多,未来充满挑战。
自动驾驶汽车
自动驾驶汽车(Autonomous vehicles; Self-piloting automobile)是一种通过电脑系统实现无人驾驶的智能汽车。
自动驾驶汽车可以实现驾驶员驾驶、系统辅助驾驶员驾驶以及系统自动驾驶。而无人驾驶汽车是不需要驾驶员的,即便在紧急情况时也能自行处理。
自动驾驶的五个等级
NHTSA:美国国家交通管理局
SAE:美国汽车工程师学会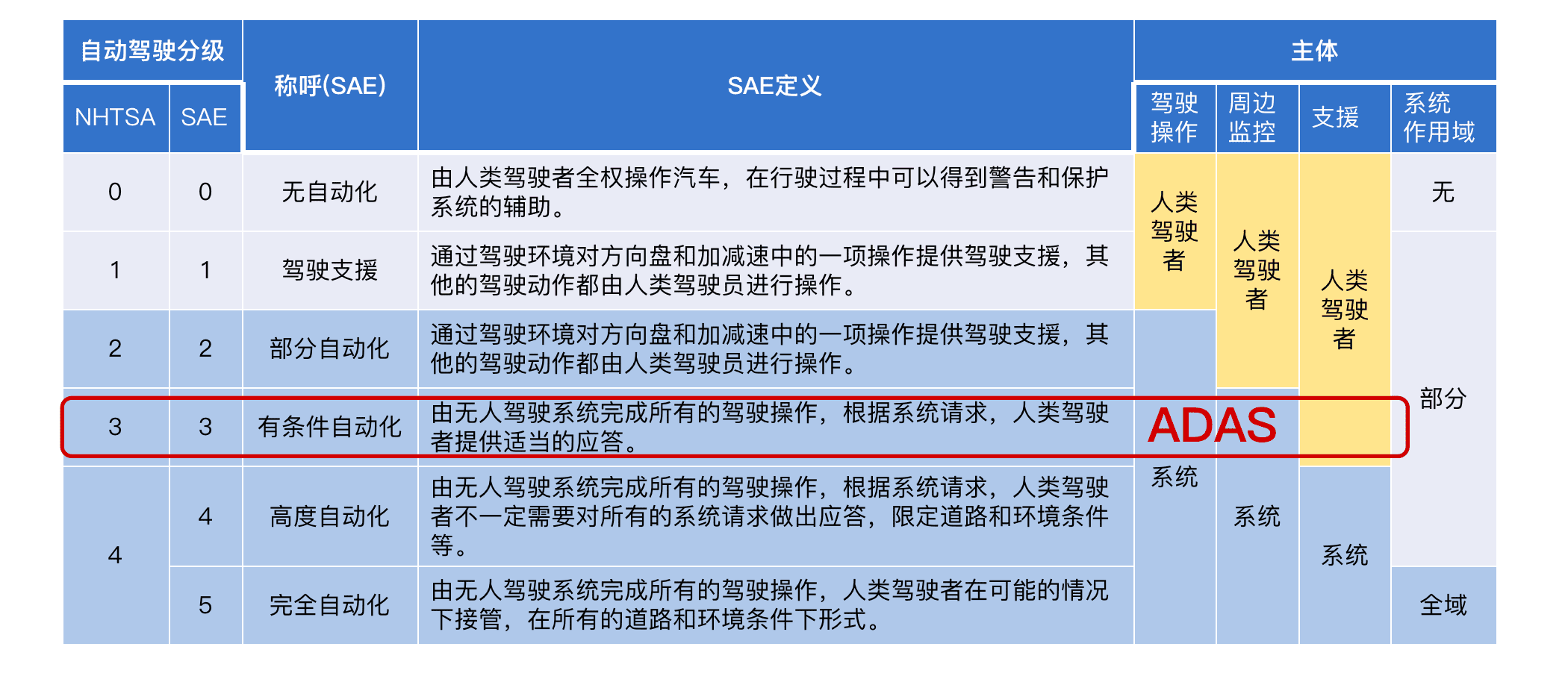
在车企们万众一心向L3级自动驾驶冲刺的关口,以自动驾驶为最终目标的ADAS系统自然而然的火了。
目前世界上大部分的汽车,都处于L1级别,只有少数汽车,比如特斯拉,已经可以处于L2级别,并在不断完善当中。
ADAS实现的是第3级,而自动驾驶实现的是第4级。想要从第3级发展到第4级,还需要更多的汽车上配有自动驾驶技术,而且得配合道路基础设施建设(道路上的摄像头,清晰的车道线),以及需要汽车互联,汽车手机互联等等,是个非常庞大的工程.
ADAS
高级驾驶辅助系统ADAS(Advanced Driver Assistance System)
利用安装在车上的各式各样传感器(毫米波雷达、激光雷达、单),在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动态物体的辨识、侦测与追踪,并结合导航仪地图数据,进行系统的运算与分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的
舒适性和安全性。
ADAS核心是
环境感知自动驾驶是
人工智能ADAS可以视作自动驾驶汽车的
前提
虽然ADAS被很多人视作自动驾驶汽车的前提,但就其本质而言,ADAS是辅助驾驶,核心是环境感知,而自动驾驶是人工智能,两者体系有很大差别。
ADAS是最接近于自动驾驶的智能辅助系统。但是目前生活中比较常用的是ADAS防碰撞预警+DSM防疲劳驾驶检测系统。
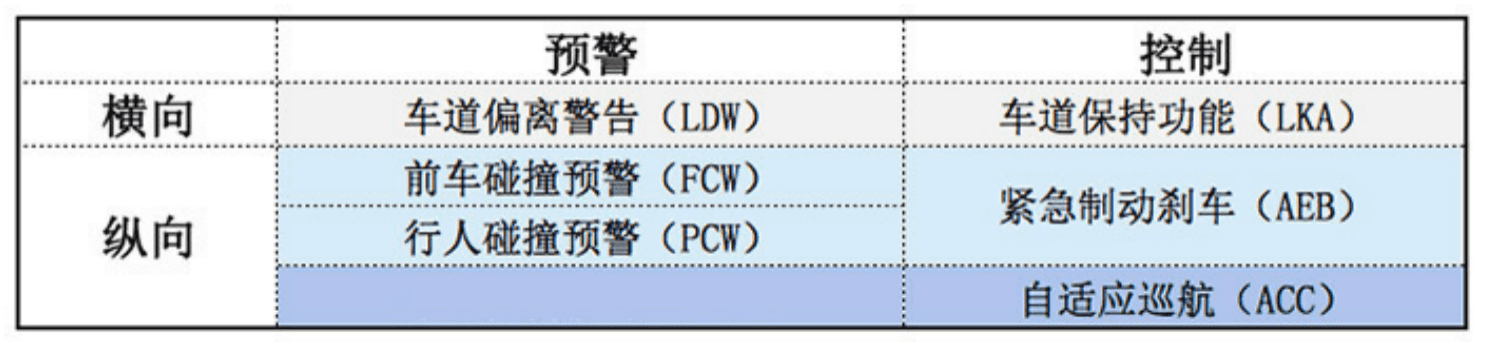
ADAS分类
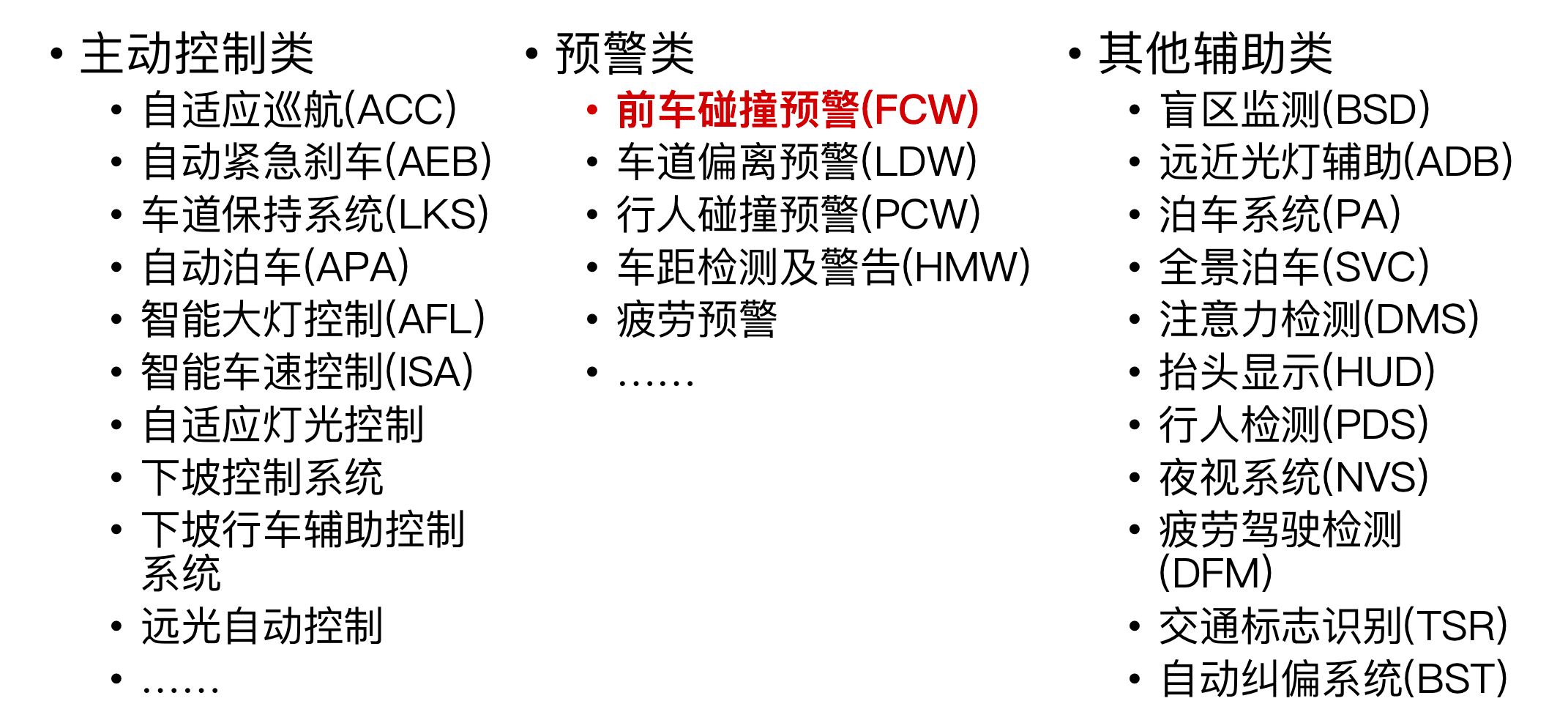
ADAS——前车碰撞预警FCW
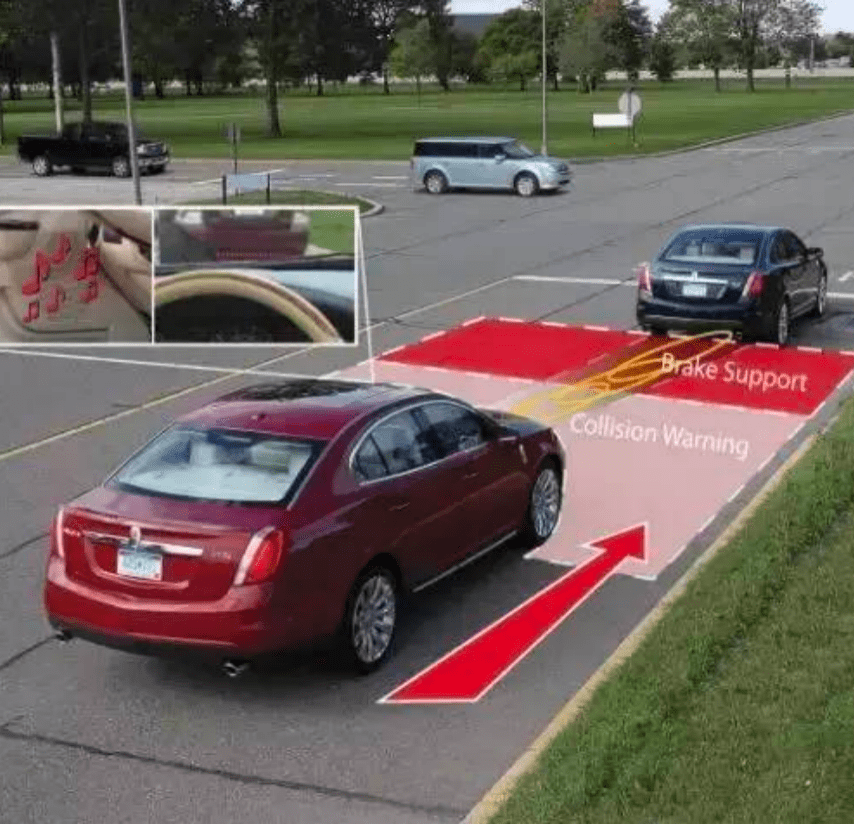
由安装在车头的雷达,侦测自车和前方车辆的距离及速度,初期会发出警告声来提醒驾驶人注意车距,若车距依然持续拉近,车辆便会先自动轻踩刹车,并轻拉安全带2-3次,警告驾驶人。
若系统判定追撞是没办法避免,启动自动紧急刹车(AEB)后,会同时立刻拉紧安全带固定驾驶人,降低意外发生后的伤害。
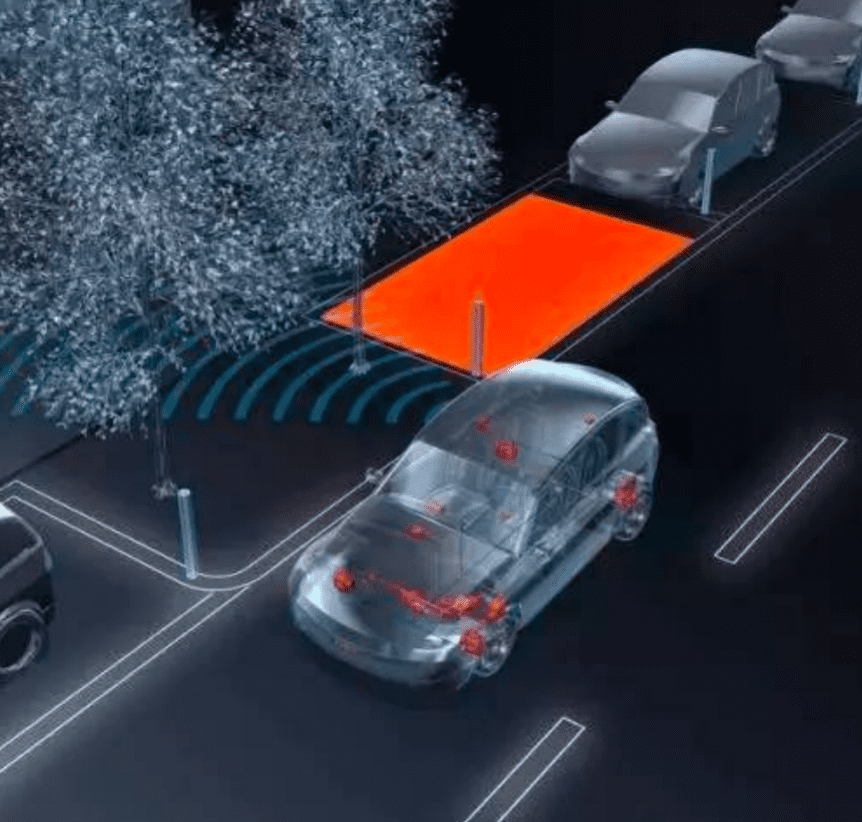
ADAS——盲点侦测系统

汽车驾驶人的盲点是指三面后视镜,左、右、内看不到的区域
盲点侦测系统就是运用雷达和传感器,来侦测车辆后方的盲点区,在盲点区侦测到车辆靠近时会向驾驶员提供警示,帮助驾驶人将意外的机率降至最低。
ADAS——停车辅助系统
停车辅助系统又分为 2种,分别是主动式与被动式 - 主动式系统自动控制方向盘以帮助驾驶完成停车,当然油门、刹车与档位切换还是要车主自行操控。 - 被动式是以影像(摄影机)与影音(超音波)为感测单元所组成的,提供更多车身周围信息给车主掌握,减少碰撞机会。
ADAS——车道偏离警示系统LDW
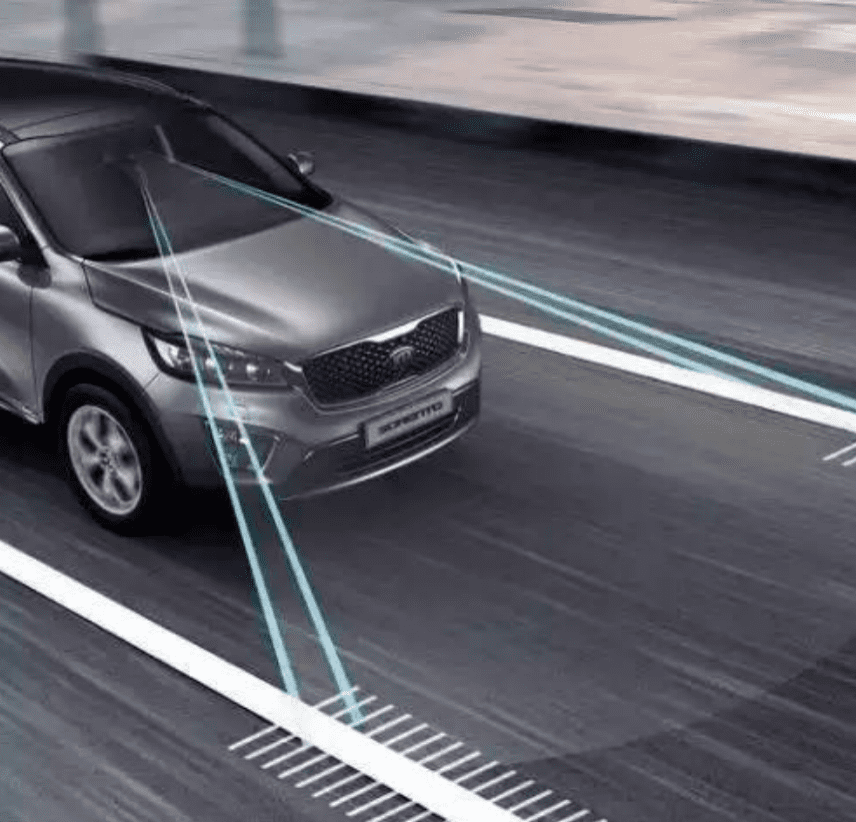
由摄影机、传感器及控制器所组成,原理是运用在车身侧面或后视镜的摄影机,采样目前行驶车道的标识线,再通过图像处理取得当前汽车在车道的位子,这时只要汽车偏离车道,控制器就会发出警报信号。
从感测到发出警报,过程只需约0.5 秒的时间,以实时提醒、叫醒驾驶,避免意外的发生。
ADAS——适应性车灯系统

这套系统可依照不同的路况、环境、车速及天气状况,自动调整车灯的照明范围及角度,让车灯照射范围可以更深远下,又不会影像到其他用路人的视线,以提供驾驶人与对向来车更安全及舒适的照明。
从过去的AFS主动转向式头灯,到现在结合传感器的多颗LED智能型头灯,都是属于此系统的范畴。
ADAS——夜视系统

可帮助驾驶可以在视线不明、看不清楚的夜晚或恶劣天气时,自动识别动物或大型异物,同时警告驾驶前方路况,以避免意外的发生。
辨别方式为以红外线来感知热量的不同,区分人、动物、车辆以及环境的差异,经过处理转变成图像,将原本看不清楚的物体清楚呈现在驾驶眼前,以降低行车风险。
ADAS——主动车距控制巡航系统 ACC
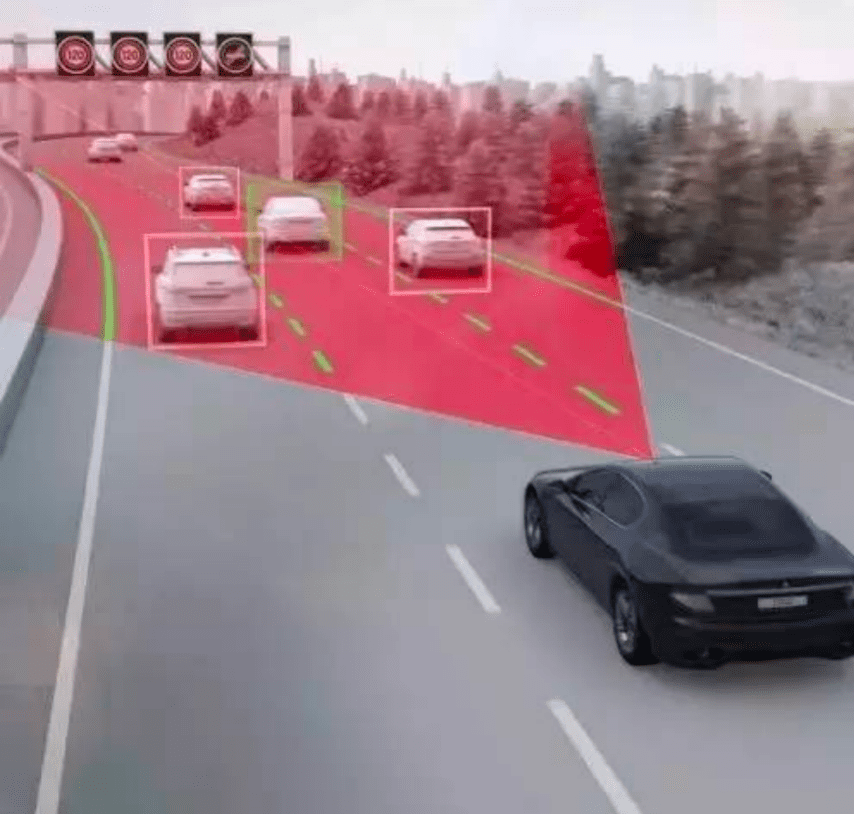
通过安装在车辆前部的车距传感器,持续扫描车辆前方道路来得知前车的车速与相对距离,行驶中会自动侦测车速,当与前车的距离越来越小时,会对应调整自身车速,与前方车辆保持安全距离,减少碰撞意外的发生,也就是所谓的高级版自动巡航系统。
目前许多车款上都已可看见此系统的踪影。
ADAS——驾驶人生理状态监视
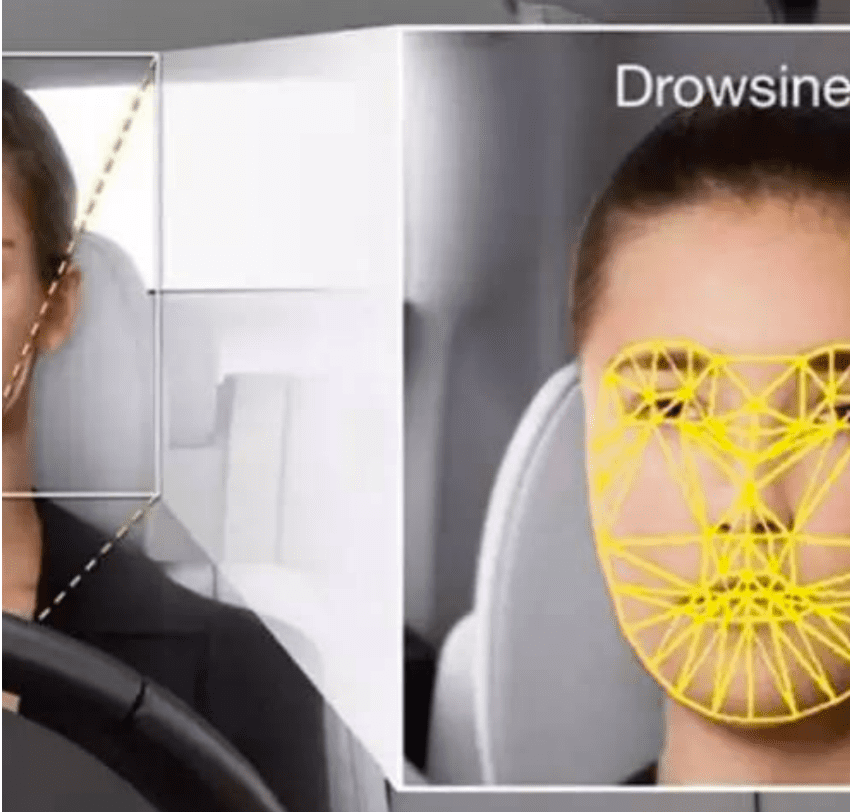
目前系统大多都是利用摄影机侦测驾驶者脸部,判断专注力程度、是否有打瞌睡的象征,还有系统更是利用驾驶人眼睛开闭频率情况,来辨别安全等级,提供适合的警告或是协助动作。
如果驾驶者的脸部表情变化减少,甚至出现闭眼的情况,车辆就会透过声响与灯号来警示车主注意,以减少意外事故发生。
ADAS关键节点
感知
目前ADAS主要采用的
传感器有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。大部份ADAS采用
摄像头+雷达的组合方式,以实现雷达测距与摄像头图像识别功能的互补。主动式与被动式红外夜视系统是两种主流的技术路线。主动式通过CCD接受物体反射的对应敏感频谱成像,而被动式的红外焦平面探测器接受物体的红外辐射成像。两者各有优势,将在较长时间内共存。不同的系统需要使用不同类型的车用传感器,包含毫米波雷达、超声波雷达、红外雷达、激光雷达、CCD CMOS影像传感器及轮速传感器等,来收集整车的工作状态及其参数变化情形,并将不断变化的机械运动变成电子参数(电压、电阻及电流)。
- 举例来说,车道偏离警告系统使用CMOS影像传感器、夜视系统则使用红外线传感器、适应性定速控制通常使用雷达、停车辅助系统则会使用超声波等。
判断
算法是ADAS系统可靠性、准确度的
决定性因素,主要包括摄像头/雷达测距、行人识别、道路交通标志识别等,针对前装应用的可靠性要求高,需要进行大量的场景测试与标定。其中雷达标定的门槛最高。电子控制单元(ECU)会在针对传感器所收集到的信息进行分析处理,然后再向控制的执行装置下达动作指令。
执行 包含油门、刹车、灯光、声响等系统都是属于执行器的范畴内,会依据ECU输出的讯号,来执行各种反应动作,让汽车安全行驶于道路上。
ADAS系统通过传感器获取数据,主芯片完成判断后,初级应用通过声音、图像、振动对驾驶者进行
警示。与电子控制功能结合后,逐渐进化到对车辆的
自动控制。
ADAS产业链
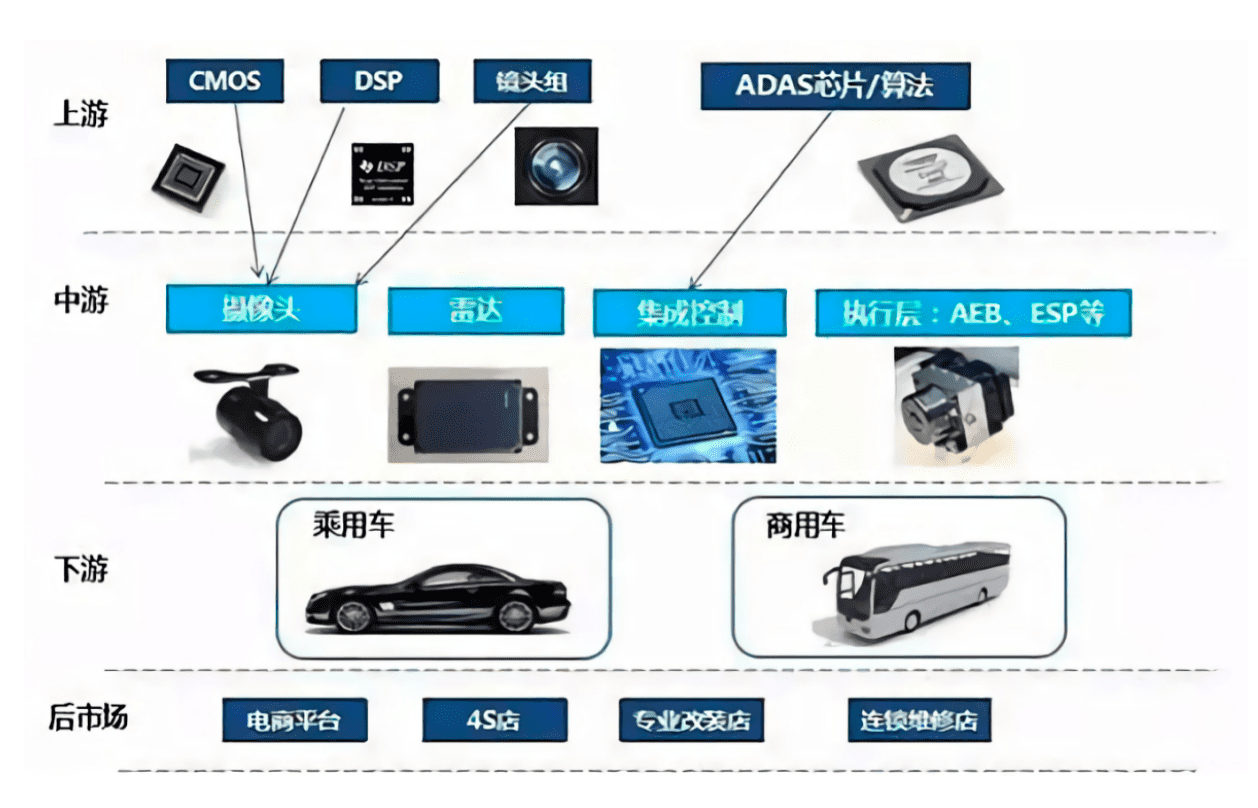
在产业链中,传感器技术(摄像头与雷达)、芯片与算法是其中的关键。
其中,摄像头核心部件CMOS感光芯片主要掌握在以索尼、三星为代表的日韩企业中。
雷达分为超声波雷达、毫米波雷达、激光雷达
- 超声波雷达技术门槛较低,供应商较多;
- 激光雷达成本高昂,未商业化;
- 毫米波雷达成本在两者之间,技术门槛较高,主要掌握在ZF TRW、博世等行业领先公司手中。
而芯片、算法在ADAS系统中至关重要,行业集中度高,主要有Mobileeye、ADI等公司
视觉ADAS
原理
图像处理,将图片转换为
二维数据模式识别,通过图像匹配进行识别,如车辆、行人、车道线、交通标志
利用物体的运动模式,或双目定位,估算目标物体与本车的相对距离和相对速度
优点
像素级别的颜色、偏移、距离等信息
成本低,信息量丰富、特征识别好
缺点
获取准确
三维信息难度大受环境光限制比较大,速度、距离分辨率差
目前在行车辅助功能中,摄像头可用来单独实现很多功能,并且按照自动驾驶发展规律逐渐演进。
这些功能更加强调对输入图像的处理,从拍摄的视频流中提取有效目标运动信息做进一步分析,给出预警信息或直接调动控制机构。相比视频输出类功能,强调高速下的实时性,这部分技术正处在发展上升期。
视觉ADAS软硬需求
摄像头模组
需要定制化开发,一般要满足宽动态、高感光、不一味追求高像素 ADAS的摄像头更讲究为行车时预留更多判断时间,需要看得更远。
核心算法芯片
如果在算法上叠加深度学习来帮助识别率提升,对硬件性能的要求只增不减,主要考虑的性能指标是运算速度、功耗、以及成本。
软件算法
源头是计算机视觉->深度学习的渗透
在感知方面,深度学习将会弯道超车传统视觉算法
无论哪种算法,数据都是用来训练测试的宝贵资源,而且不是单纯的越多越好,而是越有效越好(符合实际用车环境并保证多样化)。
小结
本次调研对ADAS有了一个系统的认知,感觉是非常有潜力以及非常有挑战的发展方向。
视觉ADAS相比于毫米波雷达识别效果更好,可以充分利用视觉信息进行车辆、路标等识别。
我们的重点在于利用感知的信息做决策,其中算法是ADAS系统可靠性、准确度的决定性因素,高效的部署会影响实时性。
接下来会对FCW及相关算法进行进一步调研


